





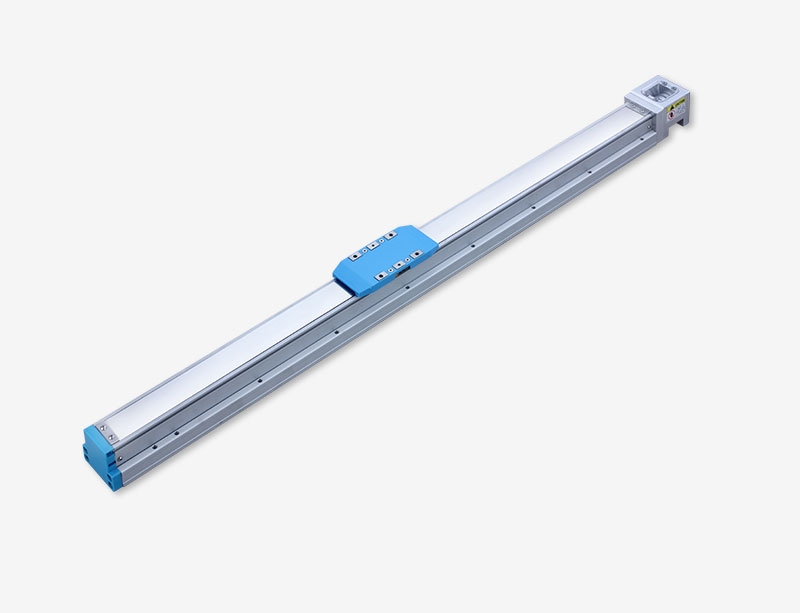
Noise and vibration suppression method of stepping motor when using linear module
When using linear module / linear module, motor will be used. What's the reason for the problem of stepping motor? It is easy to cause "buzzing" noise and great vibration when stepping motor is driven improperly.
When driving the stepper motor, if it is found that the stepper motor is in a static state, its internal noise is very obvious, which is similar to the fast change of the coil, generally due to the coil current is too large. In this case, the most effective method is to reduce the current flowing in the motor coil. The specific method includes: setting the driver to automatically half flow when the motor stops, reducing the driving current of the motor. Because of the working mode of the stepping motor, the internal coil of the stepping motor always has the current transformation.
When driving the stepper motor, if it is found that the noise and vibration of the stepper motor are obvious, check as follows:
01/
Whether the stepping motor and driver are matched to drive the linear sliding table is crucial: if they are not matched, the following steps of adjusting subdivision, driving current and speed are likely to be in vain. In my own use experience, I have encountered this situation. The motor of leisai is driven by a driver of other brands. Under the same conditions, it always produces obvious noise and vibration, and drives the mechanical structure to make a great noise. In the same way, driving the stepping motors of some other manufacturers with the drivers of leisai will also produce a lot of noise and vibration. Therefore, it is suggested that when choosing stepping motor and driver, we should buy them in sets and make sure they are regular products.
02/
Now there are two kinds of stepping motor drivers: fractional type and analog type. The analog type drives stepping motor with large noise, while the digital type basically does not. The reason is that a DSP chip is added to the digital to optimize the stepping motor drive. Therefore, if you want to ensure that the noise and vibration are as small as possible, it is recommended to choose a digital stepping motor driver.
03/
Correctly adjust the subdivision and current of the stepping motor driver. The larger the subdivision, the smaller the change range of the coil in the motor, and also reduce the noise. Subdivision is generally recommended to be set at 8 subdivision or above. If the table lookup method is used to realize the speed calculation and control during acceleration and deceleration and uniform speed, it is easy to be competent for general MCU. Under the condition that the stepping motor has enough torque to drive the load, the driving current should also be reduced as much as possible. The smaller the parameter is set, the smaller the change amplitude of the coil current in the motor will be.
04/
Correctly set up the acceleration and deceleration speed of stepping motor and the maximum running speed.
The experimental results show that during the acceleration and deceleration of the stepping motor, it is easier to generate additional noise. The solution is to increase the acceleration and deceleration speed of stepping motor properly under the condition of ensuring that the acceleration and deceleration of stepping motor do not lose step. Under light load, the acceleration and deceleration of stepping motor should be controlled within 1s, otherwise the noise caused by the change of driving current frequency will be heard obviously. When setting the maximum running speed, it is necessary to consider whether the motor torque is enough to drive the load, and whether it will resonate with the connected mechanical structure at this speed.

Recently Viewed:
News
- What factors affect the load of linear module? 2019-11-09
- Common troubleshooting methods of linear module 2019-11-09
- Common problems and solutions of using linear module 2019-11-09
- How to select linear module quickly 2019-12-26
- How to solve the noise of linear slide 2019-11-09
- Three advantages of linear module in industrial automation 2019-05-22
- Correct cleaning method of belt linear module 2019-05-22
- How to choose suitable belt linear module 2019-11-11
- Application case of linear module 2019-05-22
- What are the factors that affect the running speed of linear module 2019-12-10

